flashAttention-with-cuda
本文最后更新于:2 个月前
从softmax变形说起
safe softmax(3-pass)
即是一个长度为的向量,对它进行即有如下公式:
我们知道指数函数它的值随着的增长是爆炸性增长的,当大于某个值就会爆float,那么为了将它约束在fp32,即得到的值是安全的,没有上溢,可以减去一个,那么显然我们的,则取到的值都是安全的.
那么整个softmax过程,可以由三个循环来表示:
- 遍历,求,其中;
- 遍历,求,其中
- 遍历,求,其中
online softmax(2-pass)
上面的safe softmax使用了3次循环,即需要访问gmem3次,如果可以融合中间的计算,就可以减少对gmem的访问次数,可以采用以下思路融合前两个计算:
- 遍历,其中 ,其中;
- 遍历,其中
上述式子可以进行融合,因此可以在1个循环内完成和的计算
注: 上述式子中的的计算其实把它展开来看就很好理解,因为加上一个上一轮的最大值(就是把它消掉),减去这一轮更新的最大值
上述的式子实际上就实现了分段的softmax,即softmax所要处理的一整个向量,不需要计算完全,可以逐段计算,然后利用上述思想进行合并
FlashAttentionV1
1-pass Attention
Attention计算的公式忽略对做scaled,以及忽略mask,可以得出简化后的Attention公式:
而MHA(Multi Head Attention)只是在这个基础上将输入的切成了份的,即内部的注意力机制的计算都是一样的,只是切成了多份进行并行计算,这里我们只考虑一个头的Attention的优化,因为别的操作一样~
其中Attention中式子产生的中间阵和这俩阵分别代表的是pre-softmax logits和注意力得分阵,最终期望得到的是.其中这里给定,表示的是,表示的是
根据online softmax的思路,可以描述出一个下图的2-pass的公式来计算Attention:

其中上图中的其实就是上述的,其中的就是阵的第行与的第行计算得到的元素,这个元素进行softmax后,作为标量与阵第行进行相乘,累加到一个向量元素上,最终这个值累加完后存放到结果阵的第行,这里需要解释的点其实就是表示的含义(其实就是,与进行相乘得到的拆分后得到的结果),如下图所示,当i这个变量遍历完整个则底下中的浅蓝块会变成深蓝块,即计算完毕,体现在公式则是的更新到:

这个2pass的Attention其实第二个循环中的值依赖于第一重循环中得到的和,由此得出,即对做softmax后,与中对应的第i行相乘,从而更新
如果是以作为最后所求的值,则无法将2pass融合至1pass,但是我们所求的是,因此可以试着把中间不断迭代的展开来看,有:
将它分段来看,从而舍去整一行向量得到的,,我们取到第i个元素的值为,累和为,则原式子改写成:
经过裂项(裂出第i项,以寻找递推式)并整理可得:
上面的递推式可以这么理解:将第i-1项得到的结果,将其softmax的原分母约去,更新内部每个元素减去的最大值,然后除于最新的累和值,完成前[1,i-1]的更新;并且加上此次计算得到的第i项的结果,得出[1,i]项的结果
根据上述递推式,可以使得Attention只需要1pass.过程如下:

Tiled Attention

这里的分块,是将QKVO进行分块,它们初始的shape都是,想要在1个block内的smem放下,这里假设了smem的大小是,通过,的约束使得共享内存被最大程度的利用(是因为四个阵,它们都沿着N的方向分块,可以使得):
这样划分以尽可能多地利用共享内存
在代码实现中,由于传入的Q阵的tensor是有四个维度的数据:Tensor(b,nh,N,d)分别是batch_size,num_heads,sequence_length,head_dimension,
FlashAttentionV2
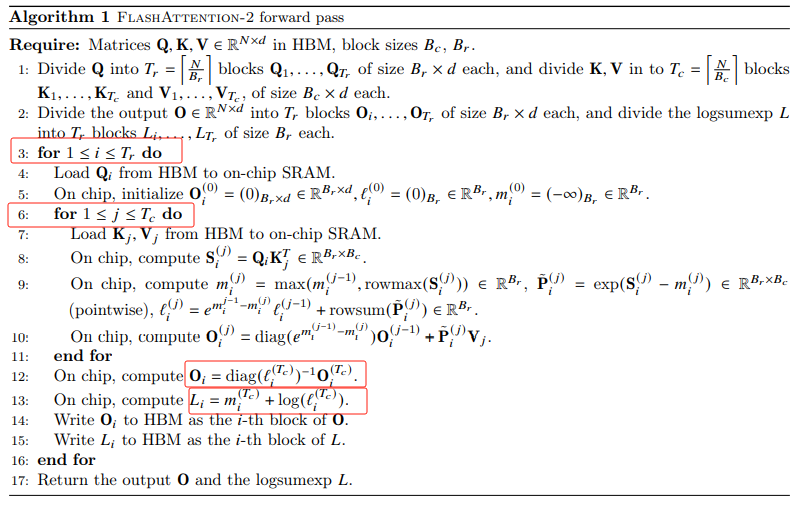
相较于V1的更新:
-
公式修改,利用Tensor Core;
好处: 把
l即softmax的分母,由12行再进行加上,这样省去了内部频繁的对l的更新 -
循环顺序调转,变成先切Q后切K,V
好处: 原先的innerloop是切Q,即遍历,那么每次都要load + store当前计算所需的Q,l,m,O;换了之后省去这部分频繁读写全局内存的开销,同时可以对sequence length做parallelism,这里主要体现在开grid的时候
dim3 grid(Tr,b*nh),由blockIdx.y定位到负责MHA的哪一个head,blockIdx.x给你定位到这个block负责某一个head的Q的 -
得以于上面调换顺序,使得slicedK, slicedV变成了slicedQ
好处: 这里可以从warp的内外积讨论,slicedQ只是切Q,每个Q负责到它所对应的O,他们的K,V都是一样的;而如果是slicedK,slicedV,那么一个Q它算出来每块要进行block_reduce_max,以取到当前这个块最大的m,这需要一次reduce;而后它们这些个要对对应的做乘积,此时是外积,做完后它们的们要做一次block_reduce_sum,可见开销很大,而slicedQ则完全不用这两次reduce
关于16816的扩展
具体实现其实也是按照公式怼,然后再优化,但是在实现的时候会发现以一个block去处理Q(Br x d) @ KT (d x Bc)那你这个block应该分做几个warp,以4个为例,则显然你用ldmatrix去读当然是.x4最优,发射一条指令,收获个16x16大小的Q块,那么此时倒推出了Br是64,同时warp size的k跟tile size(就是block大小)的k(共有的维度的意思,mnk那个k)不一致,那就是slicedK了(这个k是head dimension),相当于外积,此时单独看一个16x16的Q块,利用16816的MMA,它对应到的K块是8x16(此时ldsm不用加.trans限定符),此时如果只与一个K块做矩阵乘,则得到的Br x Bc是64() x 8,实质上可以通过多开寄存器,多次计算实现更大的Bc
Br的维度是根据多开warp来进行扩展;Bc的维度是通过多开寄存器来扩展
因此Br,Bc的维度取决于在它们方向上的线程重复次数和寄存器重复次数,由此得到TiledMMA中的AtomLayoutMNK和ValueLayoutMNK的概念由来
网上有看到一些大佬制作类triton的DSL,其以16x16为得到的目标阵一个大小,本质上就是上面提到的repeat threads和repeat register
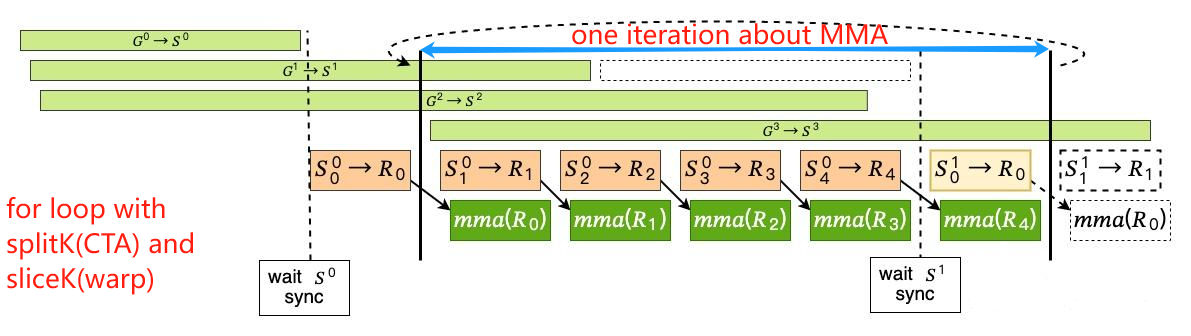
multi-stage
所谓multi-stage其实是结合了threadblock间并行和threadblock内并行.这里的multi所体现的是存储在smem buffer中的threadblock负责的目标块个数
得益于LDGSTS异步指令的出现,剥离了gmem到smem的约束,使得multi-stage成为可能.同时需要注意,multi-stage牺牲了部分的occupancy,以取得可能优于这部分occupancy带来的warp切换遮掩访存的优化
下图所体现的是一个4(k)-stage,下面简述过程(以下的tile合指同一线程块负责的A,B两个阵的目标块):
- 利用
cp.async异步拷贝k-1个tile到smem,指定对应的smem位置(单个threadblock它的smem开销大了); - 对应虚线前——利用
cp.async.wait_group [N];去同步到指定同步点,这里的N即是k-2(允许至多k-2个没完成); - 对应实线前——利用
LDSM完成第一个tile从smem拷贝到reg
以上是prelogue,接下来到了mainloop,mainloop这个循环对应的是splitK,即threadblock层级的K的划分:
- 先执行第k个异步拷贝指令,提交同步点即可,无需等待;
- 拷贝下一轮tile到reg(涉及到开多组reg,这里是2,本质上就是软流水)
- 执行mma指令
- 重复2,3步,这里本质上是slicedK,tile内的for loop,是warp这一层级的
- 遇到虚线后是此次slicedK中的最后一次计算,先把下一次的异步拷贝g2s进行wait
- 对应实线前——完成下一个tile的首个s2r,同时完成此个tile的内部的最后一次计算
重复上述步骤直至mainloop完成, 那么完成了,最终的数据都在reg,此时如果有访存密集型操作跟着的,可以合并,即算子融合,此为epilogue,那么无论你融合不融合,你数据从reg挪到gmem,要不要经过smem,视数据量而定.当然还可以开多一波寄存器,把hmma分布的数据给它搞得连续,从reg->gmem以SIMD的形式给它挪回去,当然这种做法很消耗宝贵的reg资源
FlashAttentionV3
只有阅读,没有hopper
参考文件:
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!